Automobilski komunikacioni protokoli: osnove razumevanja mreža u savremenim vozilima
Savremeni automobil je daleko od jednostavnog skupa žica i prekidača. U njemu se nalazi desetine, a kod novijih modela i preko stotinu elektronskih upravljačkih jedinica (ECU), od kojih svaka obavlja specifičan zadatak — od motora, menjača i kočnica, do klime, rasvete, podizača prozora i sistema asistencije vozaču. Da bi svi ti moduli mogli da rade usklađeno, neophodna je organizovana, pouzdana i brza komunikacija.
Tu nastupaju automobilski komunikacioni protokoli: skup pravila koja određuju kako ECU jedinice razmenjuju podatke, kako donose odluke u realnom vremenu i kako vozilo ostaje funkcionalno i bezbedno čak i u otežanim uslovima rada. Razumevanje ovih protokola predstavlja temelj dijagnostike, testiranja i svakog ozbiljnog rada sa elektronikom automobila.
Zašto automobili imaju više protokola
Kada razmišljamo o komunikaciji u klasičnom računaru, najčešće imamo jednu glavnu magistralu (ili nekoliko standardnih interfejsa) koja povezuje procesor, memoriju, disk i periferije. Iako je i tu situacija komplikovanija nego što izgleda, većina stvari se i dalje vrti oko nekoliko dominantnih standarda.
Automobil je potpuno druga priča. On nije jedan računar, već čitava mreža računara, senzora i aktuatora rasutih po celom vozilu. Svaka upravljačka jedinica (ECU) ima svoju ulogu: motor, menjač, ABS, ESP, airbag, servo upravljač, klimatizacija, električni podizači, rasveta, sedišta, retrovizori, parking senzori, kamere… Svaki od tih sistema ima svoje zahteve, svoje brzine, svoje prioritete i svoj nivo kritičnosti.
Zbog toga jedan jedini protokol ne bi mogao da zadovolji sve potrebe. Ono što je optimalno za jeftin modul u vratima (podizač prozora, retrovizor) nije optimalno za sistem kočnica ili stabilnosti vozila. U praksi ovo dovodi do toga da se u jednom automobilu istovremeno koristi više komunikacionih protokola, od kojih je svaki prilagođen određenoj vrsti zadataka.
Veliki broj modula
Kod savremenih vozila broj ECU jedinica lako prelazi 50, a kod vrhunskih modela i 100. Ne komuniciraju svi međusobno, ali su grupisani u logične celine: pogonski sklop, karoserija, bezbednosni sistemi, infotainment, pomoć vozaču (ADAS)…
Za svaki od tih podsistema potrebno je naći balans između:
- troška (koliko košta dodatna elektronika i ožičenje),
- pouzdanosti,
- potrebne brzine prenosa,
- fleksibilnosti i mogućnosti proširenja.
Nije racionalno koristiti isti, relativno skup i brz protokol za brisače, podizače prozora i senzore kiše, kao za komunikaciju između motornog ECU-a i ABS-a. Zato se uvode različite mreže, često povezane preko gateway modula.
Real-time zahtevi
Određene funkcije u vozilu imaju stroge real-time zahteve. To znači da informacije moraju da stignu u tačno određenom vremenskom okviru, ne samo “što brže moguće”. Tipičan primer su:
- kočnice (ABS, ESP),
- kontrola stabilnosti,
- motorni ECU (upravljanje ubrizgavanjem, paljenjem, momentom),
- sistemi zaduženi za aktivnu bezbednost.
Za njih je neophodna:
- deterministička komunikacija (zna se tačno kada i kojim redosledom se poruke razmenjuju),
- mogućnost prioritizacije (poruke vezane za bezbednost imaju prednost u odnosu na ostale),
- minimalno kašnjenje i predvidljivo ponašanje.
Protokoli poput CAN-a i FlexRay-a su projektovani upravo sa tim ciljem. S druge strane, sistemi koji kontrolišu osvetljenje ili komfor (podešavanje sedišta, ogledala, prozora) mogu da trpe veća kašnjenja bez posledica po bezbednost. Za njih nije potreban isti nivo real-time performansi, pa se koristi jeftiniji i jednostavniji protokol (npr. LIN).
Različite brzine i prioriteti
Ne treba svim modulima ista količina podataka, niti istom brzinom.
- motorni ECU i ABS razmenjuju relativno male količine informacija, ali veoma često i sa visokim prioritetom;
- infotainment sistem (audio, video, navigacija, kamere) obrađuje veliku količinu podataka, ali nije kritično ako se neki frejm slike zakači ili malo zakasni;
- podizač prozora ili kontrola retrovizora šalju i primaju malo podataka, i pri tome retko.
Rezultat je da se u jednom vozilu sreću:
- brze mreže (CAN, FlexRay, Ethernet) za ključne sisteme i velike količine podataka,
- sporije mreže (LIN) za periferiju i komforne funkcije.
Umesto da svi “viču” preko iste magistrale, sistem je organizovan tako da kritične informacije idu preko robustnih i brzih protokola, dok “sporedni” sistemi koriste jednostavnije i jeftinije veze. Time se istovremeno štedi novac i obezbeđuje stabilnost.
EMC zahtevi i fizička ograničenja
Automobil je izuzetno “prljavo” elektromagnetno okruženje: bobine, alternator, motori, releji, pumpa goriva, grejači, ventilatori – sve to stvara smetnje. Kablovi mogu biti dugački, provučeni pored snažnih izvora šuma, često kroz skučen prostor.
Zbog toga je izuzetno važno:
- kako je oblikovan signal,
- koliko je linija osetljiva na spoljne uticaje,
- koliko dobro sistem podnosi prenapone, padove napona i šiljke.
Neki protokoli (npr. CAN) koriste diferencijalni signal kako bi smanjili uticaj šuma i poboljšali otpornost komunikacije. Drugi (poput LIN-a) rade sa manjom brzinom i jednostavnijim fizičkim slojem, ali uz jasna ograničenja u pogledu dužine linije i broja čvorova.
Zbog različitih EMC zahteva i fizičkih uslova (dužina kablova, raspored modula, potreba za oklopljenim vodovima), nije moguće “na silu” svuda primeniti isti protokol. Fizički sloj komunikacije mora biti prilagođen okruženju u kom radi.
Upravo kombinacija ova četiri faktora — veliki broj modula, real-time zahtevi, različite brzine i prioriteti, kao i strogi EMC uslovi — dovodi do toga da savremeni automobil koristi više protokola istovremeno. Svaki od njih popunjava svoju nišu i optimizovan je za određenu vrstu zadatka, a njihova međusobna saradnja obezbeđuje da vozilo funkcioniše kao jedna celina.
Kratak istorijski pregled razvoja mreža u automobilima
Razvoj komunikacije u automobilima može se posmatrati kao postepeni prelazak iz ere „žičanih signala“ u eru mrežnih sistema. Kako su vozila postajala složenija i elektronika sve zastupljenija, javila se potreba za pouzdanim, brzim i standardizovanim načinom razmene podataka među modulima. Ta evolucija nije nastala preko noći — već kroz nekoliko jasnih faza.
Početak: Blink kodovi i prva dijagnostika
U ranim fazama elektronike u automobilima (1980-e i početak 1990-ih), vozila uglavnom nisu imala nikakvu komunikacionu mrežu. Umesto toga, početne dijagnostičke funkcije sprovodile su se preko jednostavnih metoda:
- premošćivanje određenih pinova,
- paljenje i treperenje lampice Check Engine,
- brojanje kratkih i dugih bljeskova („blink kodovi“).
Nije postojala razmena podataka između modula — jedini „komunikacioni kanal“ bio je vizuelni signal na instrument tabli. Ovo je bilo dovoljno za osnovnu dijagnostiku motora, ali nije nudilo nikakvu mrežnu arhitekturu.
K-line – prvi pravi dijagnostički komunikacioni kanal
Kako su elektronske upravljačke jedinice postale složenije, uvedena je K-linija (ISO 9141) kao jedinožična serijska veza namenjena dijagnostici i komunikaciji sa servisnom opremom.
Prednosti K-line:
- jednostavna i jeftina,
- dovoljna za potrebe tadašnjih ECU sistema,
- mogla je da radi sa više modula preko istog pina,
- relativno laka za implementaciju.
K-line je omogućila komunikaciju sa motorom, airbagom, ABS-om i drugim sistemima, ali samo dijagnostički — ne i tokom realnog rada.
KWP2000 – dijagnostička logika preko K-linije
Kako je potreba za složenijim servisnim funkcijama rasla, pojavio se KWP2000 (ISO 14230) — protokol koji uvodi:
- jasnu strukturu poruka,
- sesije,
- servisne ID-jeve,
- komunikaciju zahtev–odgovor,
- precizno definisanu inicijalizaciju.
KWP2000 se i dalje prenosi preko K-line veze, ali donosi napredniji dijagnostički dijalog i predstavlja logičan prelaz ka modernim protokolima.
CAN – početak stvarnih mreža u automobilu
Sredinom 1990-ih pojavljuje se CAN (Controller Area Network) — prvi protokol dizajniran ne samo za dijagnostiku već za realno vreme rada ECU jedinica tokom vožnje.
CAN omogućava:
- komunikaciju između više modula istovremeno,
- prioritetne poruke (arbitraža),
- otpornost na smetnje (diferencijalni signal),
- brzu i stabilnu razmenu podataka.
CAN postaje industrijski standard i ostaje osnovna mreža u većini vozila. Kasnije se pojavljuje CAN FD, sa većim brzinama i dužim poljem podataka.
LIN – jeftina dopuna CAN magistrali
Kako se povećavao broj periferijskih modula — brisači, podizači prozora, retrovizori, klapne klime — postalo je skupo i nepotrebno koristiti CAN za sve.
Zato je uveden LIN (Local Interconnect Network):
- veoma jeftin,
- jedinožičan,
- namenjen malim brzinama,
- radi u master–slave organizaciji,
- povezuje 3–16 jednostavnih uređaja.
LIN ne zamenjuje CAN, već ga dopunjuje i rasterećuje glavnu magistralu.
FlexRay – mreža za šasijske i bezbednosne sisteme
Sa pojavom aktivnih sistema stabilnosti, adaptivnog ogibljenja i ideja o steer-by-wire i brake-by-wire sistemima, javila se potreba za protokolom koji pruža:
- stroge real-time performanse,
- veliku brzinu prenosa,
- determinističko ponašanje,
- redundantnu dvokanalnu arhitekturu.
Tu se pojavljuje FlexRay, korišćen u premijum modelima i posebno zahtevnim sistemima šasije.
Automotive Ethernet – era modernih platformi
Najnovija faza razvoja je ulazak Automotive Ethernet mreža u vozila, pre svega zbog potreba:
- ADAS sistema (radari, kamere, LIDAR),
- infotainmenta visoke rezolucije,
- OTA ažuriranja,
- centralizovanih računarskih platformi.
Automotive Ethernet donosi velike brzine, prenos kompleksnih podataka i integraciju sa modernim softverskim arhitekturama poput AUTOSAR Adaptive. On otvara vrata za sisteme autonomne vožnje i nove koncepte elektronske arhitekture vozila.
Zašto proizvođač kombinuje više mreža u jednom vozilu
Na prvi pogled deluje logično da bi automobil trebalo da ima „jednu glavnu mrežu“ preko koje svi moduli komuniciraju. Međutim, u praksi je to praktično nemoguće — ne zbog teorije, već zbog fizičkih, ekonomskih i funkcionalnih ograničenja. Različiti delovi vozila imaju potpuno različite zahteve, pa se svaki komunikacioni protokol koristi tamo gde je najefikasniji.
Različite funkcionalne grupe imaju različite potrebe
Sistemi u vozilu mogu se podeliti na nekoliko velikih celina: pogonski sklop i bezbednost, karoserija i komfor, infotainment, ADAS i senzorika i energetski sistem. Svaka od ovih grupa ima specifične zahteve po pitanju brzine, pouzdanosti i arhitekture. Ne postoji „jedan protokol“ koji može optimalno da pokrije sve.
Razlike u prioritetima i kritičnosti funkcija
Neki sistemi su apsolutno kritični:
- motor mora da primi komandu ubrizgavanja svakih nekoliko milisekundi,
- kontrola stabilnosti mora da reaguje trenutno,
- airbag mora da izvrši komandu bez ikakvog kašnjenja.
Drugi sistemi ne zahtevaju takvu preciznost:
- podizanje prozora,
- svetla u kabini,
- podešavanje sedišta,
- brisači (osim pri automatskoj detekciji).
Ne bi imalo smisla gurati sve ove informacije u jednu zajedničku, skupu i brzu mrežu, kada većini modula takva moć jednostavno nije potrebna. Zato se CAN koristi za kritične sisteme, dok LIN preuzima periferiju sa nižim prioritetom.
Ekonomija: smanjenje cene proizvodnje
Ovo je jedan od najvažnijih razloga zašto se koriste različiti protokoli.
- CAN čipovi, transiveri i oklopljeni kablovi koštaju više,
- LIN komponente su višestruko jeftinije,
- mnogi moduli šalju vrlo malo podataka i ne zahtevaju mogućnosti CAN mreže.
Za veliki broj delova, ušteda od samo jednog evra po modulu postaje ogromna kada se pomnoži kroz celu proizvodnju. Zbog toga proizvođači kombinuju CAN za glavne sisteme i LIN za periferiju — efikasnost bez nepotrebnih troškova.
EMC i dužine kablova
Različiti delovi vozila izloženi su različitim izvorima šuma:
- motorni prostor je agresivan (bobine, alternator),
- vrata i karoserija imaju duže kablove i manje zaštite,
- kabina je pogodna za visoke brzine prenosa.
Protokol mora biti izabran tako da fizički izdrži uslove na lokaciji modula. Diferencijalni CAN je idealan za motorni prostor, dok je LIN prikladniji za kratke trase poput modula u vratima.
Arhitektura vozila zahteva podelu magistrala
Savremena vozila ne funkcionišu kao jedna ogromna mreža u kojoj svi moduli vide sve. To bi bilo sporo, nepouzdano i teško za dijagnostiku. Zato se mreže dele na:
- CAN Powertrain (motor i bezbednost),
- CAN Comfort (karoserija),
- CAN Infotainment,
- LIN podmreže,
- FlexRay ili Ethernet za napredne sisteme,
- centralni Gateway kao „kontrolno čvorište“.
Gateway filtrira, preusmerava i prevodi poruke između mreža, obezbeđujući stabilnost celog sistema.
Razvoj i modularnost
Ako bi sve radilo na jednoj mreži, razvoj novih sistema morao bi da čeka modifikacije cele arhitekture vozila. Korišćenjem više protokola:
- LIN sistemi mogu se unapređivati nezavisno od CAN-a,
- CAN FD se može uvoditi postepeno, paralelno sa starim CAN-om,
- ADAS i infotainment sistemi na Ethernet-u ne utiču na rad motora,
- Gateway obezbeđuje kompatibilnost generacija i prelaznih tehnologija.
Kombinovanje više mreža nije tehnička slučajnost, već ozbiljna inženjerska odluka zasnovana na funkcionalnosti, troškovima, bezbednosti i realnim uslovima rada. Svaki protokol ima svoju ulogu, a njihova saradnja obezbeđuje da savremeno vozilo radi pouzdano, efikasno i bezbedno.
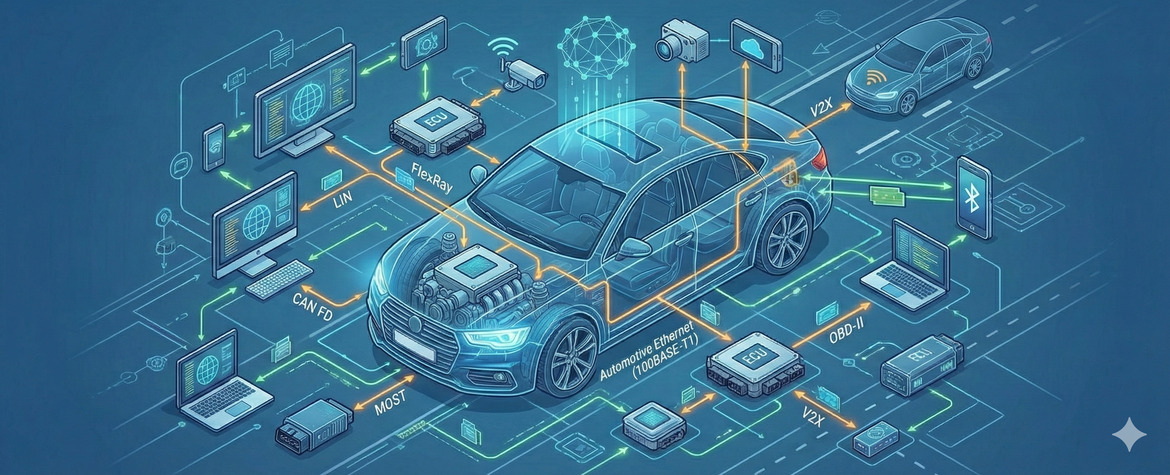
Tipična mrežna arhitektura savremenog vozila
Iako spolja deluje kao jedna celina, savremeni automobil je iznutra podeljen na više logičkih i fizičkih mreža. One su organizovane tako da razdvoje kritične sisteme od manje bitnih, da smanje opterećenje magistrala i da omoguće lakšu dijagnostiku i nadogradnju. U praksi se najčešće sreće kombinacija više CAN mreža, LIN podmreža i centralnog gateway modula koji sve povezuje.
CAN Powertrain – mreža pogonskog sklopa
CAN Powertrain je glavna magistrala zadužena za sve što se tiče pogonskog sklopa i bezbednosti: motor, menjač, ABS, ESP, električni servo, sistem kontrole proklizavanja i slične funkcije.
Na ovoj mreži se razmenjuju poruke koje imaju:
- visok prioritet,
- često osvežavanje (periodične poruke na svakih nekoliko milisekundi),
- direktan uticaj na voznu dinamiku i bezbednost.
Zbog toga je ova magistrala posebno projektovana, često sa strožim EMC zahtevima, kraćim kablovima i većom brzinom prenosa.
CAN Comfort – mreža karoserije i komfora
CAN Comfort (ili Body CAN) zadužen je za sisteme karoserije i komfora: centralnu bravu, rasvetu, brisače, klima uređaj, el. podizače prozora, senzore kiše i svetla, senzor pritiska u gumama i sl.
Poruke na ovoj mreži:
- nemaju tako stroge real-time zahteve kao Powertrain CAN,
- često su događajnog tipa (event-based) – šalju se kad se nešto dogodi, a ne stalno,
- nose informacije koje su važne za komfor i funkcionalnost, ali ne direktno za bezbednost.
Brzina, opterećenje i prioriteti poruka ovde su prilagođeni prirodi tih funkcija.
CAN Extended / Diagnostic CAN
Mnoga vozila imaju dodatnu mrežu poznatu kao CAN Extended ili Diagnostic CAN, koja služi za:
- internu komunikaciju vezanu za dijagnostiku,
- prenos informacija do i od OBD2 konektora,
- spajanje različitih mreža preko gateway-a u svrhu servisnih procedura.
Ova mreža omogućava da dijagnostički tester, povezan na OBD2 priključnicu, može da pristupi različitim ECU jedinicama bez da direktno "sedi" na svakoj od radnih magistrala u vozilu.
LIN podmreže – lokalne mreže za periferiju
Pored glavnih CAN magistrala, u vozilu postoji veliki broj LIN podmreža. One su tipično organizovane kao:
- LIN mreža u vratima (modul vrata kao master, podizač prozora, retrovizor, brava kao slave uređaji),
- LIN mreža u braniku (parking senzori, možda senzor temperature),
- LIN na klimi (step motori klapni, senzori položaja),
- druge lokalne grupe jeftinih i jednostavnih modula.
Svaka LIN mreža je vezana na neki nadređeni ECU (npr. body kontrol modul ili modul vrata) koji istovremeno "gleda" i na LIN i na neku od CAN magistrala. Na taj način se lokalni, sporiji i jeftin deo sistema integriše u glavnu komunikacionu strukturu vozila.
Gateway – centralni prevodilac između mreža
Srce mrežne arhitekture je gateway modul. On ima više interfejsa (npr. Powertrain CAN, Comfort CAN, Diagnostic CAN, pa čak i Ethernet) i obavlja nekoliko ključnih funkcija:
- prevođenje poruka između različitih mreža (npr. poruka sa Powertrain CAN-a se po potrebi šalje na Comfort CAN),
- filtriranje – ne prenosi sve poruke svuda, već samo one koje su potrebne,
- segmentaciju i zaštitu – greška na jednoj mreži ne mora da sruši ceo sistem,
- dijagnostički pristup – omogućava da tester, preko jedne tačke (OBD2), vidi više ECU jedinica na različitim magistralama.
Gateway se može nalaziti u posebnoj kutiji ili može biti ugrađen u neki centralni modul (npr. instrument tablu ili BCM).
Zašto ECU jedinice ne „vide“ jedna drugu direktno
Važno je razumeti da ECU jedinice retko imaju direktan pristup svim ostalim modulima u vozilu. One komuniciraju:
- sa ECU-ima na istoj magistrali (npr. na istom CAN-u),
- ili posredno, preko gateway-a i definisanih ruta poruka.
Razlozi za to su:
- bezbednost – ne sme svaki modul da ima neograničen pristup svemu,
- pouzdanost – kvar ili preopterećenje jedne mreže ne sme da obori ceo sistem,
- optimizacija – moduli ne moraju da znaju više nego što im je potrebno za njihov zadatak,
- jednostavnija dijagnostika – jasnije je gde pripada koji problem.
Zato često deluje kao da „nema komunikacije“ između određenih ECU jedinica, iako one u praksi razmenjuju informacije posredno, kroz gateway i definisane mrežne putanje. Razumevanje ove arhitekture ključno je za pravilno tumačenje dijagnostičkih problema i ponašanja vozila u celini.
Kako protokoli međusobno komuniciraju preko gateway jedinica
Kada vozilo ima više mreža (Powertrain CAN, Comfort CAN, LIN podmreže, možda FlexRay ili Ethernet), nameće se pitanje: kako informacije putuju između njih? Na primer, kako signal sa LIN mreže u vratima završi na instrument tabli, ili kako dijagnostička komanda dođe do ECU-a koji je fizički na drugoj magistrali? Odgovor je – preko gateway jedinica.
Gateway je modul koji „razume“ više protokola ili više instanci istog protokola (npr. više CAN mreža) i obavlja ulogu prevodioca i dispečera poruka. On:
- prima poruku na jednoj mreži,
- analizira je (ID, sadržaj, tip),
- po potrebi je modifikuje ili presloži,
- prosleđuje je na drugu mrežu samo ako je zaista relevantna.
Kako CAN i LIN „razgovaraju“
Tipičan primer je kombinacija CAN + LIN. U vratima vozila često postoji tzv. modul vrata (door module) koji se nalazi:
- na CAN Comfort mreži (prema ostatku vozila),
- na jednoj ili više LIN podmreža (prema motorima podizača, retrovizorima, bravama…).
Kada vozač pritisne dugme za podizanje prozora, prekidač šalje signal modulu vrata, modul vrata komunicira sa LIN slave uređajima, a informacija o stanju prozora (da li je otvoren, zatvoren, blokiran) može, po potrebi, biti prosleđena preko CAN-a do drugih sistema (npr. BCM, instrument tabla).
Dakle, LIN uređaji nikada ne „pričaju direktno“ sa CAN magistralom. Umesto toga, modul vrata radi kao lokalni gateway: on pretvara poruke iz LIN formata u CAN frejmove (i obrnuto koliko je potrebno).
Kako dijagnostička komanda stiže do svakog ECU-a
Kada priključiš tester na OBD2 konektor, on je fizički spojen samo na jednu ili dve mreže (najčešće na Diagnostic CAN ili direktno na jednu od CAN magistrala). Međutim, dijagnostikom možeš doći do ECU jedinica koje se nalaze na:
- drugoj CAN mreži,
- LIN podmrežama,
- ponekad čak i na FlexRay ili Ethernet segmentima.
Ovo je moguće zato što:
- dijagnostičke poruke (UDS, KWP2000…) prolaze kroz gateway modul,
- gateway zna na kojoj mreži se nalazi traženi ECU,
- poruku prosleđuje dalje, eventualno menjajući zaglavlje, adresu ili transportni sloj,
- odgovor ECU-a vraća nazad istim putem, do dijagnostičkog uređaja.
Tester, gledano spolja, komunicira „sa celim autom“, ali tehnički on razgovara sa gateway-om, koji zatim dalje vodi komunikaciju sa pojedinačnim modulima.
Kako OBD2 „sedi“ na mrežama – OBD nije mreža, već ulazna tačka
Važno je jasno razdvojiti dve stvari:
- OBD2 – standard koji propisuje konektor, pinove, osnovne protokole i pravila za emisije,
- unutrašnje mreže vozila – CAN, LIN, FlexRay, Ethernet…
OBD2 nije komunikaciona mreža u klasičnom smislu. On je:
- fizička priključnica (16-pinski DLC konektor),
- set pravila koja zahtevaju da određene informacije o emisijama i radu motora budu dostupne,
- definicija formata DTC kodova i osnovnih PID-ova (parametara u realnom vremenu).
Ispod OBD2 priključnice, u unutrašnjosti vozila, nalaze se prave mreže: Powertrain CAN, Comfort CAN, LIN podmreže, eventualno FlexRay ili Ethernet. OBD2 je samo „prozor ka tim mrežama“.
OBD2 kao zajednički ulaz za različite mreže
Kada tester pošalje OBD2 zahtev (npr. čitanje grešaka motora), poruka:
- putuje preko linije definisane standardom (npr. CAN na pinovima 6 i 14),
- stiže do gateway-a ili direktno do ECU-a, u zavisnosti od arhitekture,
- u slučaju kompleksnijih sistema, gateway dalje usmerava zahtev do ciljne jedinice.
Važno je shvatiti: OBD2 propisuje da motor i sistemi emisije moraju biti dostupni, ali ne garantuje da će svi ostali moduli (ABS, airbag, BCM…) nužno biti vidljivi preko istog seta pinova i istog protokola. To zavisi od proizvođača i načina na koji je organizovao unutrašnje mreže i gateway.
Zašto je poznavanje razlike među protokolima važno za dijagnostiku
Za dijagnostičara ili autoelektričara, komunikacioni protokoli nisu teorijska tema, već praktičan alat. Mnoga „čudna“ ponašanja vozila i dijagnostike postaju jasna onog trenutka kada znaš:
- koji protokol se koristi,
- na kojoj mreži se modul nalazi,
- kako gateway filtrira ili preusmerava saobraćaj.
Zašto neki sistemi „ne vide“ tester
Čest problem u praksi: tester se bez problema poveže sa motorom, ali ne vidi ABS, airbag ili neki komfortni modul. Razlozi mogu biti:
- modul je na drugoj mreži (npr. na drugom CAN-u ili na LIN-u preko lokalnog mastera),
- gateway ne prosleđuje poruke ako nisu u odgovarajućem režimu,
- tester koristi protokol koji taj ECU ne podržava (npr. očekuje UDS, a vozilo koristi stariji KWP2000 ili obrnuto).
Bez razumevanja mrežne arhitekture i protokola, lako je zaključiti da je „modul mrtav“, iako je problem samo u komunikacionom putu.
Zašto gateway može da blokira komunikaciju
Gateway često ima ugrađene:
- bezbednosne mehanizme (security access),
- filtere poruka (šta sme, a šta ne sme da izađe na neku mrežu),
- ograničenja za vreme vožnje (neke dijagnostičke funkcije rade samo kada vozilo stoji).
Ako dijagnostika ne zadovolji te uslove (npr. nema ispravno otključavanje, šalje nevalidne zahteve ili pokušava zabranjene funkcije u vožnji), gateway jednostavno neće proslediti poruku dalje. Rezultat: modul ne odgovara, iako je u potpunosti ispravan.
Zašto pogrešan transportni sloj znači „nema komunikacije“
Iznad fizičkog nivoa (žica, napon) i nivoa frejma (ID, DLC, checksum), postoji i transportni i aplikativni sloj – protokoli poput KWP2000, UDS, vlasničke (proprietary) varijante itd. Ako tester:
- pokuša da priča UDS-om sa ECU-om koji očekuje KWP2000,
- koristi pogrešne ID-jeve ili adrese,
- ne ispoštuje sekvencu inicijalizacije,
modul će jednostavno ćutati. Na fizičkom nivou postoji signal, na CAN mreži vidiš frejmove, ali na protokolnom nivou „nema dogovora“ – jezici se ne poklapaju.
Zato je poznavanje razlike među protokolima ključno za ozbiljnu dijagnostiku. Umesto da se nasumično menja delove po vozilu, mnogo efikasnije je razumeti koji protokol gde živi, kako putuju poruke i gde može da „pukne lanac“ komunikacije. To je ono što odvaja puko „čitatanje grešaka“ od pravog inženjerskog pristupa dijagnostici.