
Uvod
U savremenim vozilima broj elektronskih komponenti neprestano raste, ali ne zahtevaju svi sistemi složene i brze komunikacione mreže poput CAN-a. Za mnoge sporedne, ali funkcionalno važne sisteme – brisače, podizače stakala, retrovizore, alternatore, senzore i razne aktuatore – razvijen je jednostavniji i jeftiniji komunikacioni protokol: LIN (Local Interconnect Network).
LIN protokol je zamišljen kao podmreža CAN mreže, sa fokusom na nisku cenu, jednostavnu implementaciju i pouzdanu komunikaciju između jednog mastera i više slave uređaja. Umesto komplikovane arbitraže i visoke brzine prenosa, LIN se oslanja na determinističku komunikaciju, jednu žicu i jasno definisanu hijerarhiju u mreži.
U ovom članku ću objasniti kako LIN protokol funkcioniše, gde se koristi u vozilu, kakva je struktura LIN frejma i zašto je razumevanje ovog protokola izuzetno korisno u dijagnostici, razvoju i testiranju autoelektronike.
Kratak istorijat i standardizacija
LIN protokol je počeo sa razvijanjem krajem devedesetih godina kao odgovor na rastuću potrebu za jednostavnom i jeftinom komunikacijom između elektronskih modula u vozilima. U to vreme, CAN magistrala se već etablirala kao pouzdano rešenje za kritične sisteme, ali je njena primena za jednostavne aktuatorske i komforne funkcije bila nepotrebno skupa i kompleksna.
Razvoj LIN protokola pokrenuo je industrijski konzorcijum koji su činili veliki proizvođači automobila i dobavljači autoelektronike, sa jasnim ciljem da se definiše komunikacioni protokol koji koristi minimalne hardverske resurse, jednostavan softver i što manji broj žica, uz dovoljnu pouzdanost za sisteme koji nisu bezbednosno kritični.
LIN je od samog početka zamišljen kao podređeni protokol, koji funkcioniše uz CAN magistralu – CAN kao kičma vozila, a LIN kao CAN-ova pod mreža za periferne uređaje. Ovaj koncept se vrlo brzo pokazao kao uspešan, pa je LIN postao široko prihvaćen u automobilskoj industriji.
Danas se LIN protokol vodi pod međunarodnim standardom ISO 17987, koji precizno definiše fizički sloj, komunikacioni sloj, format poruke i ponašanje čvorova u mreži. Standardizacijom je LIN dobio dugoročnu stabilnost i interoperabilnost, što je omogućilo njegovu masovnu upotrebu u vozilima različitih proizvođača.
Gde se LIN koristi u vozilu
LIN protokol se koristi u sistemima gde nisu potrebne velike brzine prenosa podataka, ali je važna pouzdana i predvidiva komunikacija uz minimalne hardverske zahteve. Zbog toga je njegova primena najčešća u takozvanim komfornim i pomoćnim sistemima vozila, koji nisu bezbednosno kritični, ali imaju direktan uticaj na funkcionalnost i korisničko iskustvo.
Tipični primeri LIN uređaja su motori brisača, podizači stakala, električni retrovizori, sedišta, klapne ventilacije, kao i razni senzori položaja, temperature ili opterećenja. U ovim sistemima jedan centralni modul (najčešće body kontroler) preuzima ulogu mastera, dok su pojedinačni aktuatori i senzori povezani kao slave uređaji na lokalnoj LIN mreži.
LIN se često koristi i unutar samih modula, kao interna komunikacija između glavnog mikrokontrolera i perifernih podsklopova. Na primer, u motoru brisača ili alternatoru, LIN veza može služiti za razmenu komandi, povratnih informacija o stanju, dijagnostičkih podataka i statusnih grešaka, sve preko jedne komunikacione linije.
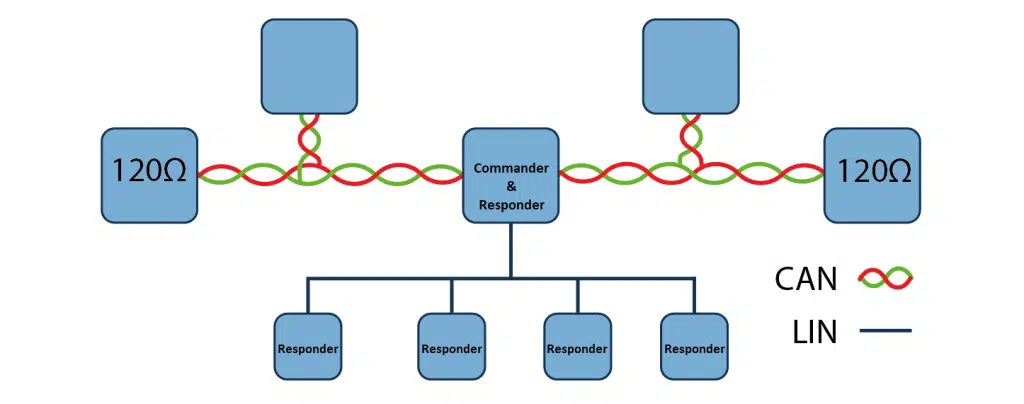
U savremenoj arhitekturi vozila, LIN mreže su gotovo uvek povezane na CAN magistralu preko gateway modula. Na taj način se zadržava jednostavnost i niska cena LIN-a na lokalnom nivou, dok CAN obezbeđuje centralizovanu komunikaciju, dijagnostiku i integraciju sa ostalim sistemima vozila. Ovakva hijerarhijska podela mreža predstavlja jedan od osnovnih principa moderne autoelektronike.
U praksi, LIN protokol je već godinama prisutan u komponentama sa kojima se autoelektričari svakodnevno susreću, često i ne znajući da iza jednog jedinog voda stoji digitalna komunikacija. Tipični primeri su pametni alternatori sa LIN regulacijom punjenja, gde se preko LIN-a razmenjuju podaci o opterećenju, temperaturi, stanju punjenja akumulatora i zahtevima ECU-a. Zatim, tu su strujni senzori na plus ili minus polu akumulatora (IBS), koji preko LIN veze šalju precizne informacije o struji, naponu i temperaturi baterije.
LIN se masovno koristi i u motorima brisača, posebno kod Bosch sistema, gde isti motor u sebi sadrži elektroniku koja prima LIN komande za brzinu, intervalni rad i park poziciju, a zauzvrat vraća status motora i eventualne greške koje se kasnije mogu iščitavati pomoću dijagnostičkih uređaja. Slična situacija je i kod motora ventilatora kabine nešto novijih generacija (gde su proizvođači PWM upravljanje ventilatorima zamenili LIN upravljanjem), klapni ventilacije kabine i klimatizacije, električnih retrovizora sa memorijom, električnih sedišta, servo klapni u usisu, kao i kod pojedinih pumpi rashladne tečnosti SUS motora i ulja sa promenljivim režimom rada.
Posebno zanimljivi primeri su elektronski regulatori alternatora, kao i moduli brave vrata, gde se preko LIN-a prenose i komande i dijagnostički podaci. Zajedničko svim ovim komponentama je to što spolja često izgledaju kao obični potrošači sa napajanjem i masom, dok se stvarna inteligencija i komunikacija odvijaju preko jednog tankog signalnog voda.
Arhitektura LIN mreže (master–slave)
LIN mreža je organizovana kao jednostavna hijerarhija: uvek postoji jedan master čvor i jedan ili više slave čvorova na jednožičnoj magistrali. Maksimalan broj čvorova na magistrali, uključujući i master, je 16. Master je šef komunikacije – on određuje kada se razmena podataka dešava, kojim redom i kojim identifikatorom (ID). Za razliku od CAN-a, gde čvorovi mogu sami da „upadnu“ na magistralu, LIN je deterministički: slave uređaji ne šalju podatke kada oni žele, već isključivo kao odgovor na zahtev mastera.
Komunikacija je zasnovana na rasporedu (schedule table) koji master koristi da periodično šalje zaglavlje frejma (header) sa određenim ID-jem. Nakon toga, tačno jedan slave čvor (onaj kome pripada taj ID) šalje podatke (response) ili ih prima, u zavisnosti od toga da li je frejm predviđen za slanje ili za prijem, taj deo je podešen u samom slave čvoru. Na ovaj način je jasno definisano ko kada govori, što smanjuje složenost i omogućava stabilan rad čak i sa vrlo jednostavnim mikrokontrolerima.
U praksi, master je najčešće centralni modul kao što je BCM (body kontroler), klima modul ili drugi nadređeni kontroler, dok su slave čvorovi lokalni aktuatori i senzori: motor brisača, regler alternatora, strujni senzor na akumulatoru, moduli vrata, klapne ventilacije i slično. Bitno je razumeti da LIN nije mreža ravnopravnih – on je zamišljen da bude jeftin i predvidiv, pa je zato master uvek taj koji inicira komunikaciju.
Takođe je važno napomenuti da jedan slave čvor, ukoliko je u pitanju izvršni uređaj - aktuator (brisač, alternator ...), skoro uvek poseduje podešene najmanje dva ID-ja na koje odgovara. Na primer, neki tipovi alternatora kada prime od mastera ID 0x29 sa setom podataka znaju da na osnovu tih podataka treba da podesi punjenje. Ali kada prime ID 0x11 tada vraćaju masteru set podataka o trenutnom stanju alternatora (struja punjenja, temperatura ...).
Topologija LIN mreže
LIN mreža je po topologiji najčešće jednostavna magistrala (bus) sa jednim signalnim vodom koji ide od mastera i grana se ka više slave uređaja. U realnoj instalaciji to često izgleda kao kombinacija magistrale i kratkih odvojaka (stubova) do pojedinačnih uređaja. Zbog malih brzina prenosa i relativno tolerantnog fizičkog sloja, ovakva topologija je pogodna za vozilo gde se instalacije prirodno granaju kroz vrata, stubove, instrument tablu i motorni prostor.
Dužina instalacije je ograničena praktičnim pravilima proizvođača i standarda da bi se obezbedila pouzdana komunikacija. U praksi, problemi se najčešće ne javljaju zbog predugačke magistrale, već zbog loših masa, oksidacije konektora, oštećenih provodnika, pogrešnih spajanja ili zamene komponenti koje nisu kompatibilne (npr. druga verzija modula sa drugačijim LIN ponašanjem).
Važno je napomenuti da LIN mreža nije predviđena za lančano povezivanje više mastera ili za slobodno dodavanje novih čvorova kao na nekim industrijskim mrežama. U vozilu je sve definisano unapred: ko je master, koji su slave uređaji, koji su njihovi ID-jevi i kojim redom se komunicira. Zbog toga dijagnostika često zahteva razumevanje šta je na toj konkretnoj LIN grani očekivano da postoji i kako treba da se ponaša.
Fizički sloj LIN protokola
LIN koristi jednu komunikacionu liniju (LIN bus) uz masu vozila kao referencu, što ga čini veoma ekonomičnim po pitanju instalacije. Signal je tipično single-wire i radi u odnosu na masu, a u stanju mirovanja (recesivno stanje) linija je povučena, preko pull-up otpornika na nivo blizak napajanju. Aktivno stanje (dominantno) se postiže povlačenjem linije ka masi, tako da se na osciloskopu vidi jasan prelaz između višeg naponskog nivoa i niskog nivoa.
Brzina prenosa kod LIN-a je značajno niža od CAN-a (tipično do oko 20 kbit/s), što omogućava veću toleranciju na instalacione nepravilnosti i jednostavniji hardver u čvorovima. Na fizičkom nivou, LIN koristi UART-like serijsku komunikaciju sa definisanom strukturom frejma, uključujući i specifičan break signal kojim master označava početak frejma. Upravo taj break je jedna od najprepoznatljivijih karakteristika LIN signala na osciloskopu.
U praksi, fizički sloj LIN-a je mesto gde se često najbrže uoči problem: ako nema 12 V u stanju mirovanja, ako linija stoji „zakucana“ na masu, ako su ivice signala spore, ako ima previše šuma ili se break ne pojavljuje, komunikacija neće biti stabilna. Zato je razumevanje naponskih nivoa, mirovanja, dominantnog stanja i ponašanja linije pod opterećenjem ključan deo dijagnostike LIN sistema – čak i pre nego što se uopšte uđe u dekodiranje ID-jeva i podataka.
Struktura LIN frejma
Da bi se LIN protokol pravilno razumeo i dijagnostikovao u praksi, neophodno je znati kako izgleda jedan kompletan LIN frejm i koji je smisao svakog njegovog dela. Sve ono što se na osciloskopu vidi kao niz impulsa, pauza i karakterističnih prelaza, direktno odgovara jasno definisanoj strukturi frejma propisanoj standardom.
LIN komunikacija je strogo organizovana: master uvek započinje frejm slanjem zaglavlja (header), dok se deo sa podacima i kontrolnom sumom (data + checksum) može pojaviti u nastavku bez prekida ili kao odgovor drugog čvora. U zavisnosti od tipa frejma, master može sam poslati i zaglavlje i podatke, ili poslati samo zaglavlje, nakon čega tačno jedan slave uređaj odgovara slanjem podataka i kontrolne sume. Važno je naglasiti da slave uređaji nikada ne šalju zaglavlje – oni isključivo odgovaraju na zahteve mastera i šalju podatke samo kada su na to pozvani.
Šta je LIN frejm
LIN frejm predstavlja osnovnu komunikacionu jedinicu na LIN magistrali. Svaka razmena informacija, bilo da se radi o komandi, statusu ili dijagnostičkom podatku, odvija se kroz jasno definisan frejm. Za razliku od nekih drugih magistrala, LIN frejm je strogo deterministički i uvek započinje inicijativom master čvora.
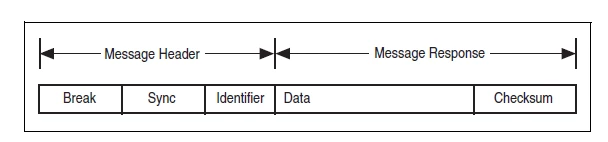
Svaki LIN frejm se sastoji iz dva logička dela: zaglavlja (header) i odgovora (response). Header uvek šalje master i njime se najavljuje komunikacija, dok response sadrži stvarne podatke i kontrolnu sumu. Response može poslati master ili jedan slave uređaj, u zavisnosti od toga kako je konkretan frejm definisan u komunikacionom rasporedu.
Break, Sync i Identifier – zaglavlje (header)
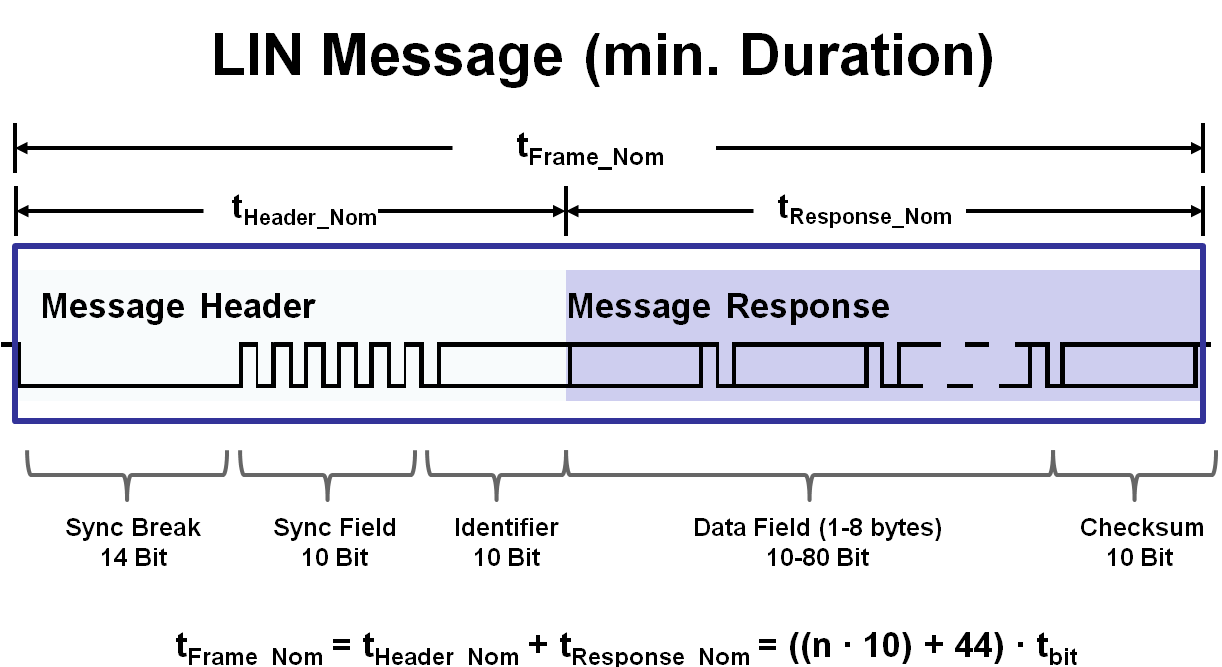
Zaglavlje LIN frejma sastoji se od tri dela: break polja, sync bajta i identifikatora. Break signal je produženi dominantni nivo na LIN liniji i po standardu traje od 13 do 16 bitova. Njegova uloga je da svim čvorovima jasno označi početak novog frejma i omogući resinhronizaciju, čak i u slučaju da su prethodno izgubili tajming komunikacije.
Nakon break-a sledi sync bajt, koji ima fiksnu vrednost 0x55. Ova vrednost je izabrana zbog svoje bitne strukture (naizmenični 0 i 1) i omogućava slave uređajima da precizno usklade svoju brzinu komunikacije sa masterom, čak i ako njihovi interni oscilatori nisu potpuno tačni.
Treći deo zaglavlja je identifikator, često nazivan ID. Važno je naglasiti da je stvarni LIN identifikator širok 6 bitova i da njegove vrednosti mogu biti u opsegu od 0x00 do 0x3F (decimalno 0–63), i nikada van tog opsega. Ovi donji bitovi identifikatora određuju koji slave uređaj treba da odgovori i kakav tip podataka se očekuje u nastavku frejma.
Kako bi se obezbedila dodatna zaštita od grešaka, identifikator se ne šalje samostalno, već kao PID (Protected Identifier). PID se sastoji od 6-bitnog ID-ja i još dva gornja bita (P0 i P1), koja predstavljaju paritetne bitove. Ovi paritetni bitovi omogućavaju detekciju jednobitnih grešaka u identifikatoru, čime se povećava pouzdanost komunikacije već u samom zaglavlju frejma.
Na osnovu primljenog PID-ja, svi čvorovi na LIN mreži znaju da li treba samo da slušaju magistralu ili da, u slučaju da im ID pripada, pošalju odgovor u response delu frejma.
Data bytes (0–8 bajtova)
Deo sa podacima može sadržati od 0 do 8 bajtova, po LIN standardu, i predstavlja stvarni koristan sadržaj LIN komunikacije. U zavisnosti od definicije frejma, podatke može slati master ili tačno jedan slave uređaj. Svi ostali čvorovi u tom trenutku samo slušaju magistralu.
U praksi, podaci mogu predstavljati komande (npr. zahtev za brzinu motora), povratne informacije (status, položaj, temperatura), kao i dijagnostičke ili servisne informacije. Važno je razumeti da smer komunikacije nije slobodan – unapred je definisano ko šalje podatke za svaki ID.
U praksi sam često nailazio na implementacije koje ne prate striktno standardnu dužinu od 0 do 8 data bajtova, već koriste različite, proizvođački specifične kombinacije.
Checksum (classic i enhanced)
Na kraju response dela frejma nalazi se kontrolna suma (checksum), koja služi za proveru integriteta podataka. LIN definiše dva tipa kontrolne sume: klasičnu (classic) i naprednu (enhanced). Kod klasične kontrolne sume u izračunavanje ulaze samo data bajtovi (LIN v1), dok enhanced checksum uključuje i identifikator frejma (LIN v2).
Upravo ovde se u praksi najčešće prave greške, posebno pri razvoju alata, emulatora ili testera. Ako se koristi pogrešan tip kontrolne sume, slave uređaj će ignorisati frejm i ako je namenjen za njega, jer će smatrati da je došlo do greške pri prenosu podataka i da su podaci neispravni, iako svi ostali delovi komunikacije deluju ispravno. U slučaju da master očekuje set podataka od slave čvora kome je namenjena poruka sa tim ID-jem i da sa setom podataka dobije kontrolnu sumu koja je pogrešna prijaviće grešku. Razumevanje koji tip checksum-a koristi konkretna LIN mreža je ključno za pouzdanu komunikaciju.
Kako LIN frejm izgleda na osciloskopu
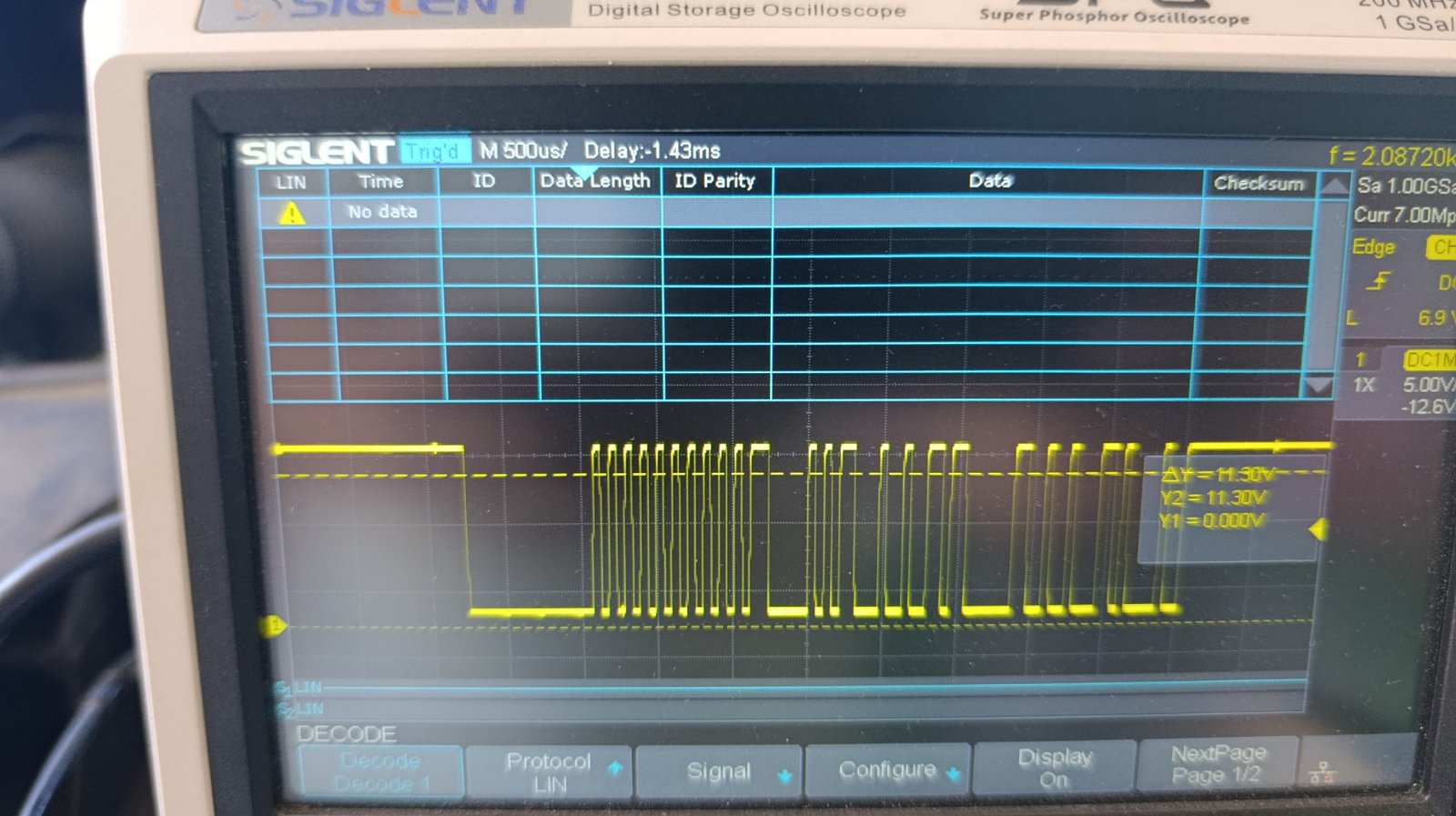
Na osciloskopu, LIN frejm se jasno prepoznaje po karakterističnom break signalu, nakon koga sledi niz pravilno vremenski raspoređenih impulsa koji predstavljaju sync, ID, data bajtove i checksum. Zbog relativno male brzine prenosa, prelazi signala su jasno vidljivi i pogodni za analizu čak i sa osnovnom mernom opremom.
Ovde je važno naglasiti da pri posmatranju LIN komunikacije na osciloskopu može doći do zabune, jer svaki bajt u prenosu zauzima ukupno 10 bitova. To su jedan start bit, osam data bitova i jedan stop bit, koji obuhvataju svaki preneti bajt – uključujući sinhronizacioni i ID bajt. Ova UART-like struktura često dovodi do pogrešnog tumačenja dužine frejma kod onih koji prvi put analiziraju LIN signal na fizičkom nivou.
U dijagnostici, posmatranje LIN signala na osciloskopu često je prvi korak: već na osnovu oblika signala može se zaključiti da li master šalje zaglavlja, da li slave odgovara, da li postoji prekid komunikacije ili problem na fizičkom sloju. Upravo zato je razumevanje strukture frejma neophodno pre bilo kakvog ozbiljnijeg rada sa LIN protokolom.
Brzina LIN komunikacije (baud rate)
LIN protokol je od samog početka zamišljen kao spora, ali pouzdana komunikaciona magistrala, prilagođena jednostavnim uređajima i dugim instalacijama u vozilu. Brzina prenosa podataka je zato relativno mala u poređenju sa CAN-om, ali dovoljno velika za potrebe komfornih sistema i pomoćnih funkcija.
U praksi se danas najčešće susreće LIN komunikacija brzinom od 19.2 kbps. Ova brzina je postala de facto standard u savremenim vozilima jer predstavlja dobar kompromis između brzine odziva i robustnosti signala. Na većini novijih modela, upravo se ova vrednost može videti prilikom merenja LIN signala na osciloskopu ili logičkom analizatoru.
Kod starijih vozila i ranijih generacija modula, često se može sresti brzina od 9.6 kbps. Ova brzina je bila veoma rasprostranjena u prvim implementacijama LIN protokola, posebno u jednostavnijim modulima sa ograničenim hardverskim resursima. Iako je danas ređa, i dalje se pojavljuje u starijim sistemima i prilikom zamene ili retrofita pojedinih komponenti.
Standard predviđa i niže brzine, poput 4.8 kbps, ali se one u realnoj servisnoj praksi gotovo ne susreću. Iako su tehnički podržane, ovakve brzine su uglavnom ostale rezervisane za vrlo specifične ili rane implementacije i nemaju značajnu zastupljenost u savremenim vozilima.
Važno je naglasiti da svi čvorovi na istoj LIN grani moraju raditi na istoj brzini. Ako se brzina pogrešno proceni ili pogrešno podesi prilikom testiranja, emulacije ili dijagnostike, komunikacija će izostati ili će delovati nestabilno. Zbog toga je određivanje stvarne brzine prenosa jedan od prvih koraka prilikom analize LIN signala u praksi.
U praksi sam se više puta susretao i sa situacijom da jedno vozilo koristi različite LIN brzine na različitim LIN granama. Na primer, LIN mreža za motor brisača može raditi brzinom od 19.2 kbps, dok je LIN veza ka alternatoru ili strujnom senzoru akumulatora podešena na 9.6 kbps. Ovo nije kontradikcija standardu, već posledica toga što se svaka LIN grana projektuje zasebno, u skladu sa zahtevima konkretnih modula i generacijom elektronike.
Zbog toga je važno ne pretpostavljati da cela LIN komunikacija u vozilu koristi istu brzinu. Prilikom merenja i dijagnostike, svaku LIN liniju treba posmatrati kao nezavisnu celinu i posebno proveriti njen baud rate, jer pogrešna pretpostavka o brzini često dovodi do zaključka da komunikacija ne postoji, iako je u realnosti samo pogrešno interpretirana.
Praktični saveti za merenje i osnovnu dijagnostiku LIN linije
Prvi korak u proveri LIN komunikacije uvek je osnovno merenje same linije. U stanju mirovanja, LIN linija se nalazi u recesivnom stanju i njen napon je blizak naponu napajanja vozila (najčešće oko 12 V). U praksi, ovo stanje je često teško uhvatiti klasičnim multimetrom, jer čim su moduli aktivni, master vrlo brzo počinje da šalje zaglavlja frejmova i linija više nije statična. Ipak, merenje može dati grubu informaciju da li je linija u kratkom spoju sa masom ili stalno povučena na plus.
Ako je dostupan makar i jeftin osciloskop, mogućnosti dijagnostike se značajno proširuju. Već kratkim pogledom na signal može se prepoznati da li LIN komunikacija uopšte postoji: karakterističan break signal, pravilni impulsi i jasno razdvojeni bajtovi ukazuju da master radi i da linija nije u kratkom spoju ni sa masom ni sa napajanjem. Čak i bez dekodiranja podataka, sam oblik signala pruža dragocenu informaciju o stanju instalacije.
Jedna od vrlo korisnih praktičnih metoda je praćenje response dela frejma prilikom isključivanja pojedinih LIN uređaja. Ako se nakon otkačinjanja određenog modula izgubi odgovor (data + checksum), a zaglavlje i dalje postoji, to je dobar indikator da je upravo taj uređaj bio aktivni slave čvor i da je LIN signal do njega bio korektan. Na ovaj način se može potvrditi ispravnost instalacije i same komunikacije, čak i bez detaljnog poznavanja protokola.
Važno je naglasiti da ovakva brza dijagnostika ne može uvek sa sigurnošću otkriti tačan kvar, ali u velikom broju slučajeva omogućava da se brzo isključe osnovni problemi: kratki spojevi, prekidi linije, neaktivni master ili neodgovarajući slave uređaji. Upravo zbog toga je razumevanje osnovnog oblika LIN signala i njegovog ponašanja na osciloskopu izuzetno korisno u svakodnevnoj servisnoj praksi.
Računanje LIN kontrolne sume
Kontrolna suma (checksum) u LIN protokolu nalazi se na kraju response dela frejma, iznosi 1 bajt, i služi za proveru integriteta podataka. Prijemnik na osnovu primljenih bajtova ponovo računa checksum i poredi ga sa primljenom vrednošću. Ako se vrednosti ne poklapaju, frejm se smatra neispravnim i u praksi se najčešće ignoriše i prijavljuje greška.
Classic i Enhanced checksum
LIN standard definiše dva tipa checksum-e: classic i enhanced. Razlika je u tome koji bajtovi ulaze u računanje:
Classic checksum: Data0 + Data1 + ... + DataN Enhanced checksum: PID + Data0 + Data1 + ... + DataN
Osnovni princip računanja
Checksum se računa sabiranjem svih relevantnih bajtova koristeći 8-bitnu aritmetiku. To znači da se pri sabiranju zadržava samo donjih 8 bitova (mod 256), dok se višak preko 0xFF odbacuje. Na kraju se dobijena suma invertuje (bitwise NOT), čime se dobija checksum bajt.
1) Saberi bajtove (8-bitno, mod 256) 2) Ako zbir pređe 0xFF -> zadrži samo donjih 8 bitova 3) Checksum = 0xFF - suma
Primer: classic checksum
Pretpostavimo da response deo sadrži sledeće data bajtove:
Data0 = 0x12 Data1 = 0x34 Data2 = 0x56
Zbir: 0x12 + 0x34 + 0x56 = 0x9C Checksum: 0xFF - 0x9C = 0x63
Checksum vrednost koja se šalje u frejmu je 0x63.
Primer: kada zbir prelazi 0xFF (odbacivanje viška)
Ako zbir pređe 0xFF, zadržava se samo donjih 8 bitova (mod 256), a višak se odbacuje:
Data0 = 0xF0 Data1 = 0x30 Zbir: 0xF0 + 0x30 = 0x120 -> zadržava se 0x20 Checksum: 0xFF - 0x20 = 0xDE
Primer: enhanced checksum (PID + data)
Kod enhanced checksum-a, u računanje se dodaje i PID (Protected Identifier). Sledeći primer prikazuje princip računanja kada je PID = 0x55, a data bajtovi su 0x12, 0x34 i 0x56:
PID = 0x55 Data = 0x12 + 0x34 + 0x56 Zbir (8-bitno, mod 256): 0x55 + 0x12 + 0x34 + 0x56 = 0xF1 Checksum: 0xFF - 0xF1 = 0x0E
U ovom primeru, checksum bajt koji se šalje u frejmu ima vrednost 0x0E.
Checksum u servisnoj i razvojnoj praksi
U realnim uslovima, checksum je često presudan faktor da li će slave uređaj prihvatiti ili ignorisati frejm. Ako je checksum pogrešno izračunat ili ako se koristi pogrešan tip (classic umesto enhanced ili obrnuto), slave može potpuno ignorisati komandu ili će se komunikacija ponašati nestabilno, iako signal na osciloskopu izgleda “zdravo”.
Zbog toga je razumevanje checksum-a ključno prilikom razvoja testera, emulatora i R&D alata, ali i prilikom ručne analize LIN komunikacije. U praksi, situacija gde postoji header i response, ali uređaj ne reaguje očekivano, vrlo često se na kraju svede upravo na checksum.